Hello Humans
Foundations
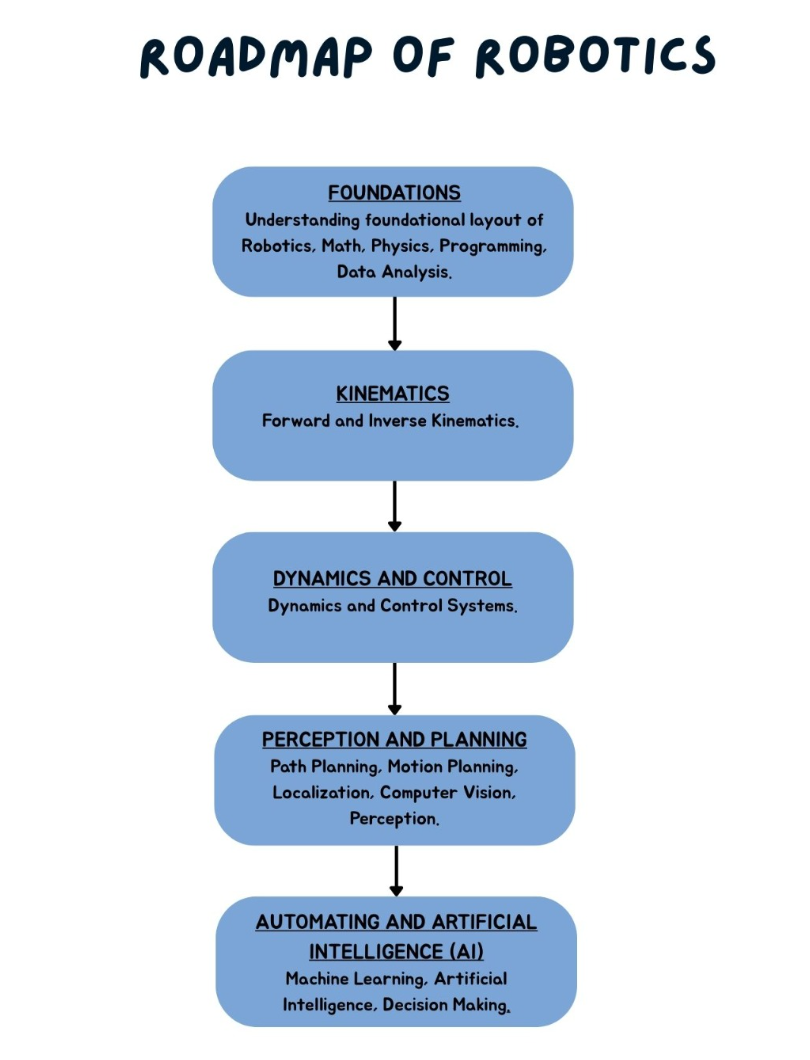
Think of this roadmap like you are building a house – each stage builds on the previous ones.
What it is: The basic tools and knowledge you need before building any robot.
Real-world applications:
Math & Physics: When a delivery drone needs to calculate how much battery power it needs to fly 5 miles against a 15 mph wind, that’s math and physics in action.
Programming: Writing the code that tells a vacuum robot “when you hit a wall, turn right and keep cleaning”.
Data Analysis: A farming robot analyzing soil moisture data from hundreds of sensors to decide where to water crops.
Think of foundations like learning to drive – you need to understand the basics (steering wheel turns the car, brake pedal stops it) before you can navigate traffic.
Kinematics
What it is: Understanding how robot parts move and where they end up. Real-world applications:
Forward Kinematics: A robotic arm in a factory knows “if I bend joint 1 by 30°, joint 2 by 45°, and extend joint 3 by 6 inches, my hand will reach exactly where the car part needs to be welded”
Inverse Kinematics: A surgical robot figures out “I need to reach this exact spot inside the patient - what angles do all my joints need to be at?”
Everyday example: When you see a robot bartender making drinks, it’s using kinematics to know exactly how to move its arm so the bottle pours into the glass, not on the counter
This is like being able to reach for your coffee cup without looking - your brain automatically calculates the arm movements needed.
Dynamics and Control
Dynamics
Understanding all the forces acting on a robot and how they affect movement. Real-world applications:
Gravity effects: A robotic arm lifting heavy car parts must generate enough torque to overcome gravity pulling the part down
Friction considerations: A walking robot’s feet need enough friction with the ground to push off without slipping, but warehouse robots need to account for how smooth floors reduce friction
External forces: A construction robot working outdoors must account for wind pushing against it while it operates
Mars rover example: Engineers must account for Mars’ lower gravity (38% of Earth’s) when programming how much force the wheels need to climb over rocks
Control
The systems that actively manage and adjust robot movements to achieve desired outcomes. Real-world applications:
Drone stabilization: When wind tries to push a drone sideways, control systems instantly adjust the propeller speeds to keep it hovering in place
Walking robots: A humanoid robot like Boston Dynamics’ Atlas uses control systems to maintain balance - when it steps on uneven ground, sensors detect the tilt and motors immediately adjust to prevent falling
Prosthetic limbs: Advanced prosthetics use control systems to provide just the right amount of grip force - strong enough to hold a hammer, gentle enough to hold an egg
Surgical precision: Control systems filter out surgeon hand tremors, scaling down movements for micro-surgery
Think of dynamics as understanding the “physics problem” the robot faces, while control is actively solving that problem in real-time.
Perception and Planning
What it is: Helping robots see, understand their environment, and plan their actions. Real-world applications:
Self-driving cars: The car’s cameras and sensors create a map of everything around it, identifies pedestrians, other cars, and traffic signs, then plans the safest route to your destination
Warehouse robots: Amazon’s robots scan barcodes, navigate between shelves, and plan the most efficient path to collect items for your order
Home robots: A robot vacuum maps your house, remembers where furniture is, and plans a cleaning pattern that covers every spot without getting stuck
Search and rescue: Robots in disaster zones use cameras to identify survivors, plan routes through rubble, and navigate back to safety
Mars rovers: NASA’s rovers analyze rock samples, identify interesting geological features, and plan multi-day journeys across alien terrain
This is like being dropped in a new city - you need to figure out where you are, where you want to go, and the best route to get there while avoiding obstacles.
Artificial Intelligence (AI)
What it is: Making robots smart enough to make decisions and learn from experience. Real-world applications:
Personal assistants: Home robots learn your daily routine and automatically adjust temperature, lighting, and music preferences
Agricultural robots: Farm robots learn to identify ripe fruits vs. unripe ones, adjusting their harvesting strategy based on crop conditions
Security robots: Mall security robots learn normal vs. suspicious behavior patterns, automatically alerting human guards when something unusual happens
This is like the difference between following a recipe exactly versus being an experienced chef who can improvise and adapt based on available ingredients and taste preferences.
How They All Work Together
Imagine a robot chef in a restaurant:
Foundations: It knows basic cooking principles, can read recipes, and processes ingredient information
Kinematics: It calculates how to move its arms to chop vegetables at the right angles and speeds
Dynamics & Control: It applies just the right pressure to slice tomatoes without crushing them, and maintains steady stirring motion
Perception & Planning: It sees when onions are golden brown, smells when garlic is ready, and plans the timing so everything finishes simultaneously
AI: It learns that customers prefer their steaks cooked longer on rainy days, and automatically adjusts cooking times based on weather and customer history